
Close
Frequency Modulated (FM) MEMS Gyroscopes
The work is carried out in the framework of the collaboration of the department of Civil and Environmental Engineering of Politecnico di Milano, Italy with STMicroelectronics.
People involved: V. Zega, C. Comi, P. Minotti, G. Langfelder, A. Corigliano
FM working principle
The FM working principle is based on the control of the velocities of the proof mass along three orthogonal directions through an electronic circuit and on the measurement of the frequency variations of the three modes of interest induced by the Coriolis forces.
If the natural frequencies of the three translational modes of the FM gyroscope are different one from the others by design (i.e. there is a mismatch between the modes in the MEMS language), when no external angular rate is applied to the device, the pattern followed by the gyroscope’s proof mass is the tridimensional Lissajous trajectory (see Figure 1).
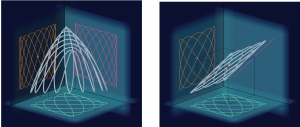
Figure 1: 3D Lissajous trajectories for different combinations of frequencies and phases along the three axes. The open-source software GeoGebra has been employed.
The expression of the scale factors of a real three-axial FM gyroscope are the angular gains. They depend only on geometrical quantities being strictly related to the mass distribution of the mechanical structure and on the coupling among the modes. For this reason, the scale factors of a three-axial FM gyroscope are little dependent on over etch and other fabrication imperfections and are completely independent from environmental fluctuations such as temperature. This property represents the main advantage of the FM gyroscope with respect to the AM counterpart.
In order to implement a real three-axial FM gyroscope, it is necessary to minimize by design the non-ideal terms (e.g. through the maximization of the decoupling between the three modes) and to have a proper algorithm for the detection of the output signal able to distinguish between offset, quadrature and the wanted signal. The proof mass of a three-axial FM gyroscope must be able to simultaneously translate along the three orthogonal directions. Proper deformable portions and auxiliary structures must, then, be designed in order to guarantee the wanted motion of the gyroscope’s proof mass and a good decoupling between the three modes of interest. In order to reject the effect of inertia forces possibly coming from an external acceleration and for a better functioning of the gyroscope, a fully differential two-masses structure is proposed for the first pitch/roll and 3-axis FM gyroscopes.

Figure 2: schematic view of the three-axial FM gyroscope. Differential mode along the (a) xaxis, (b) y-axis and (c) z-axis.
Pitch/Roll FM gyroscopes
A first pitch FM gyroscope is fabricated through the ThELMA © surface micromachining process of STMicroelectronics and it represents, to the authors’ knowledge, the first small-footprint (690 µm × 946 µm) prototype of FM gyroscope able to measure an in-plane angular rate.
The measured scale factor, defined as the mean angular gain, equals 0.973 Hz/Hz, in close agreement with theoretical predictions. It depends only on the mass distribution in the mechanical structure and is, consequently, not influenced by environmental fluctuations.
The mechanical structure of a new dual-mass FM pitch gyroscope is then presented together with the analytical and numerical models adopted during the design process to estimate the reliability of the structure and the quality factor.
Preliminary experimental characterization of the new device proves the validity of the simulation models and the effectiveness of the proposed design.
Bibliography:
[1] V. Zega, P. Minotti, G. Mussi, A. Tocchio, L. Falorni, S. Facchinetti, A. Bonfanti, A.L. Lacaita, C. Comi, G. Langfelder, A. Corigliano ‘The first frequency-modulated (FM) pitch gyroscope’ Proceedings, 1, 393, doi:10.3390/proceedings1040393 (2017) 1-5
[2] V. Zega, C. Comi, P. Fedeli, A. Frangi, A. Corigliano, P. Minotti, G. Langfelder, L. Falorni, A. Tocchio ‘A dualmass frequency-modulated (FM) pitch gyroscope: mechanical design and modelling’ Inertial ’18, Lake Como, Italy, March 26-29, 2018
[3] P. Minotti, G. Mussi, G. Langfelder, V. Zega, S. Facchinetti, A. Tocchio ‘A system-level comparison of amplitude- vs frequency- modulation approaches exploited in low-power MEMS vibratory gyroscopes’ Inertial ’18, Lake Como, Italy, March 26-29, 2018
[4] P. Minotti, S. Dellea, G. Mussi, A. Bonfanti, S. Facchinetti, A. Tocchio, V. Zega, C. Comi, A. Lacaita, G. Langfelder ‘High scale-factor stability frequency-modulated MEMS gyroscope: 3-axis sensor and integrated electronics design’ IEEE Transaction on Industrial Electronics, 65(6) (2018) 5040-5050
Modal analysis of the dual-mass pitch FM gyroscope
x-axis differential translational mode of the dual-mass pitch FM gyroscope. The contour of the displacement field is shown in colour.
z-axis differential translational mode of the dual-mass pitch FM gyroscope. The contour of the displacement field is shown in colour.
3-axis FM gyroscopes
The FM working principle is formalized for the three-axial case for the first time and the governing equations are derived both in the idealized case of a point-mass gyroscope and in the real case of a distributed-mass gyroscope.
Moreover, the mechanical structure of the first three-axial MEMS FM gyroscope is proposed and studied. Preliminary experimental measurements prove the validity of both the model and the simulations results employed during the design process. The proposed structure overcomes lots of the constraints of the surface micromachining fabrication processes and represents an important step towards the development of a new class of MEMS gyroscopes.
Bibliography:
[1] V. Zega, C. Comi, P. Minotti, G. Langfelder, L. Falorni, A. Corigliano ‘A new MEMS three-axial frequencymodulated (FM) gyroscope: a mechanical perspective’ European Journal of Mechanics/A Solids, 70 (2018) 203-212.
[2] A. Tocchio, L. Falorni, C. Comi, V. Zega ‘Frequency modulation MEMS triaxial gyroscope’ Deposited patent n.17177405.2-1557 (June 2017)
[3] V. Zega, C. Comi, E. Bordiga, G. Langfelder, L. Falorni, A. Corigliano ‘Towards 3-axis FM MEMS gyroscopes: mechanical design and experimental validation’ Transducers 2019 – Eurosensors XXXIII, Berlin, Germany, June 23-27, 2019.